I min forrige post så vi på hvordan vi kan finne linjer i et bilde. Dette brukte vi for å finne kantene på et bord, og tegnet inn resultatet i originalbildet. Vi har altså nå et bord hvor vi vet hvor kantene går - og skal jobbe videre med dette for å finne ut noe om hva som er på bordet:
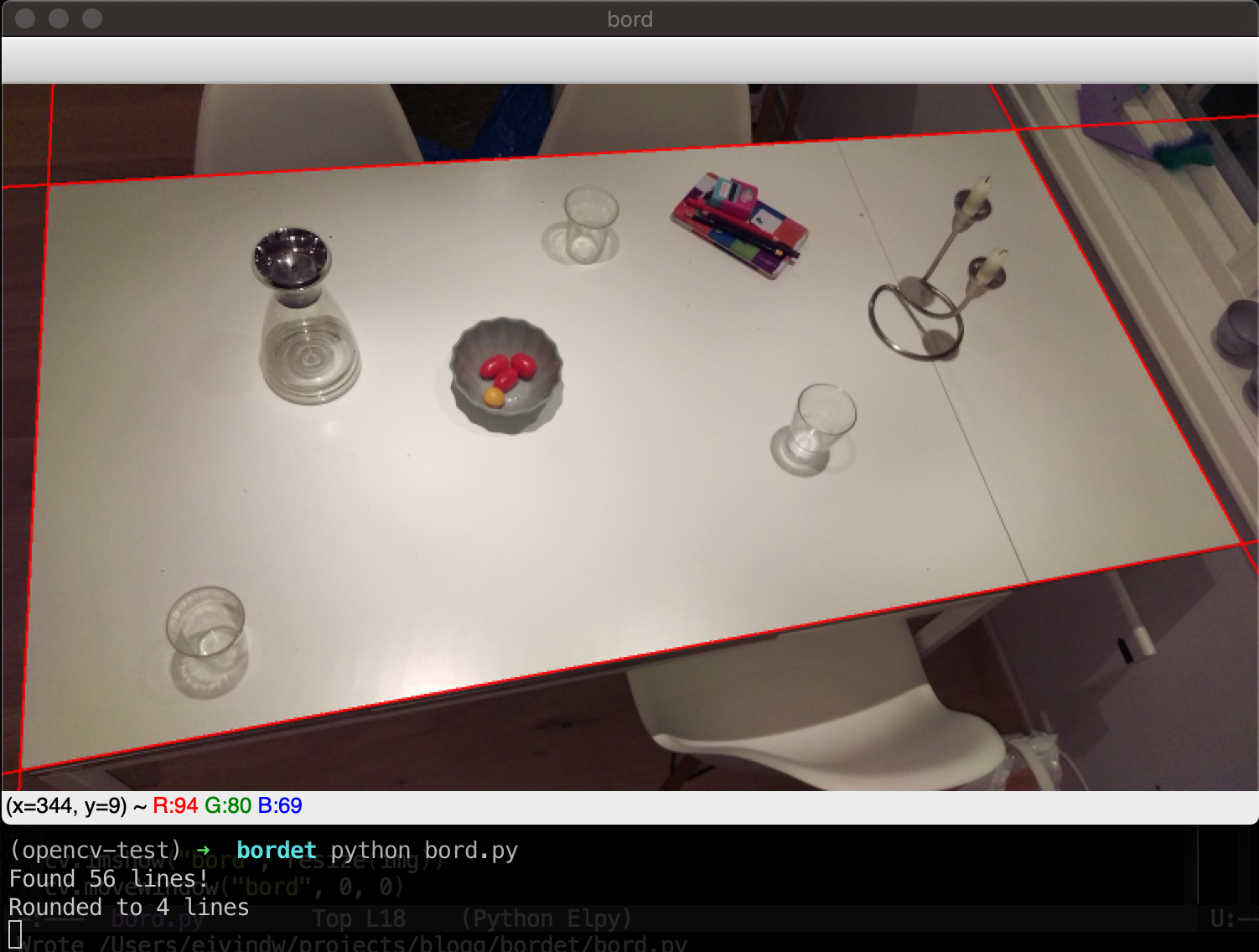
Vi må lage oss et utsnitt basert på kantene vi har funnet. Så skal vi se på området inni dette utsnittet for å prøve å analysere oss frem til hvor mange ting som ligger på bordet, og hvilke egenskaper disse har.
¶Utsnitt basert på linjer
Når man driver med linjer og punkter blir det fort en del funksjoner som minner om
mattetimene fra skolen. Funksjonen som tegner linjene i forrige post regner egentlig
bare ut endepunktene for linjene - og tegner streker mellom dem. HoughLines gir oss
en liste av vinkler (theta) og avstander (rho) - som vi kan bruke for å finne to
punkter i hver sin ende av linjen utenfor bildet:
def findEndPoints(rho, theta):
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
# Legg til/trekk fra 2000 piksler for å få et punkt utenfor bildet
x1 = int(x0 + 2000 * -b)
y1 = int(y0 + 2000 * a)
x2 = int(x0 - 2000 * -b)
y2 = int(y0 - 2000 * a)
return (x1, y1), (x2, y2)
Jeg ønsker å finne skjæringspunktene mellom linjene - som da burde tilsvare hjørnene på det fine kjøkkenbordet. Etter litt søking på internet fant jeg frem til en funksjon som representerer linjen som en vektor - og en annen funksjon som finner krysspunktene mellom to slike linjer. Jeg slang på noe maks-verdier på krysspunkt-sjekken for å være sikker på at vi bare plukker opp punkter som ligger innenfor den synlige delen av bildet:
def createLine(p1, p2):
A = (p1[1] - p2[1])
B = (p2[0] - p1[0])
C = (p1[0] * p2[1] - p2[0] * p1[1])
print("p1: {} p2: {}".format(p1, p2))
print("A: {} B: {} C: {}".format(A, B, C))
return A, B, -C
def intersection(L1, L2, xMax, yMax):
D = L1[0] * L2[1] - L1[1] * L2[0]
Dx = L1[2] * L2[1] - L1[1] * L2[2]
Dy = L1[0] * L2[2] - L1[2] * L2[0]
if D != 0:
x = Dx / D
y = Dy / D
if 0 <= x <= xMax and 0 <= y <= yMax:
return int(x), int(y)
else:
return False
else:
return False
Jeg endrer funksjonen som finner linjer i bildet - som ble skrevet i forrige post - til å returnere linjene som par av endepunkter og slike vektor-linjer:
...
if(uniqueLines.get(roundedLine, None) is None):
endPoints = findEndPoints(rho, theta)
uniqueLines[roundedLine] = endPoints, createLine(*endPoints)
...
Ok - så med disse endringene og de nye funksjonene kan vi lage en funksjon som finner alle bordhjørnene våre:
def findIntersections(img, lines):
height, width, _ = img.shape
uniqueIsects = set()
for (_, line) in lines:
for (_, otherLine) in lines:
if line != otherLine:
isect = intersection(line, otherLine, width, height)
if isect:
uniqueIsects.add(isect)
return sorted(uniqueIsects)
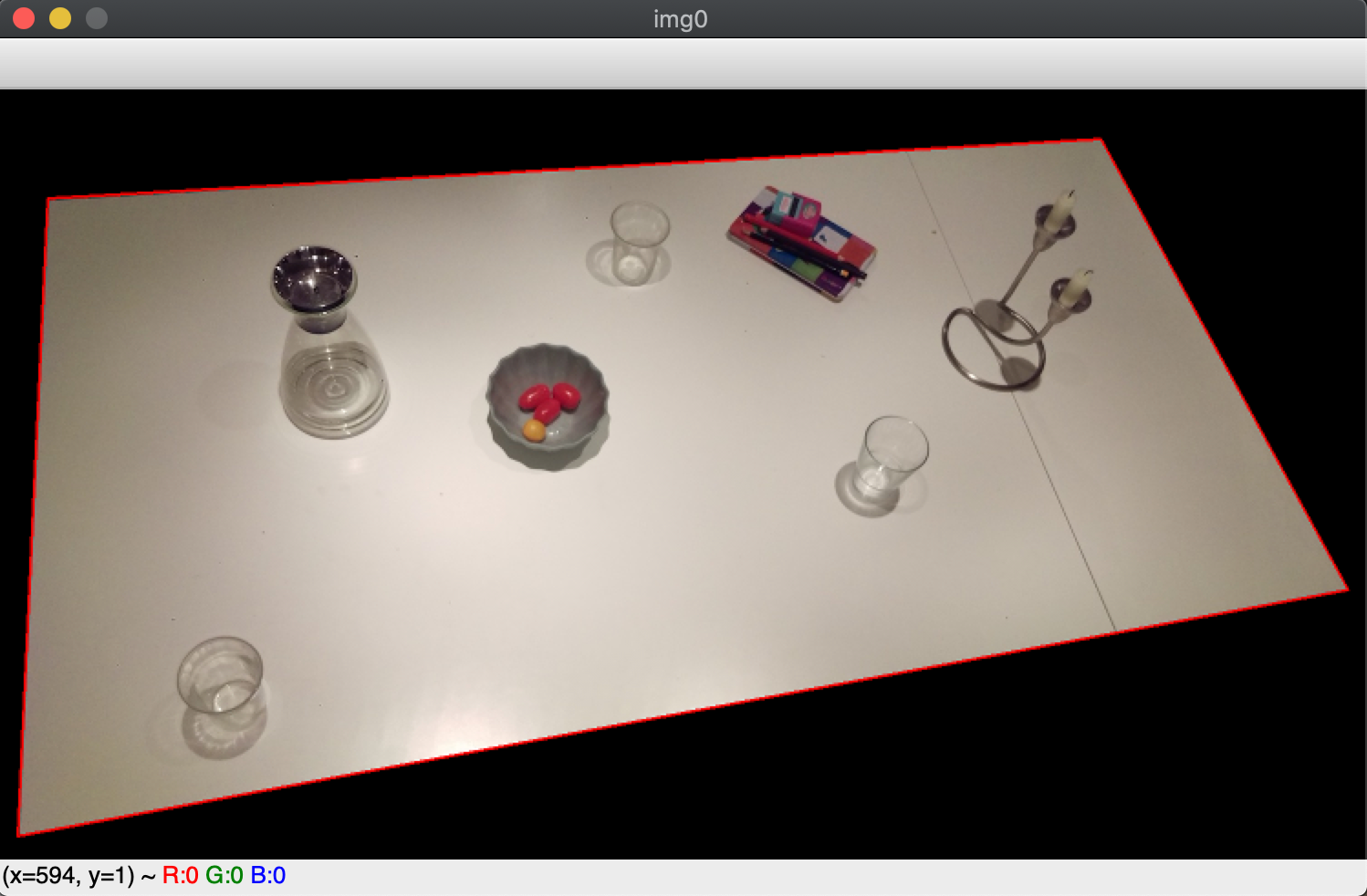
Med disse byggeklossene kan vi nå lese inn bildet, finne linjer og krysningspunkter. Punktene kobler vi sammen til en figur som vi kan trekke fra det originale bildet - slik at vi sitter igjen med et bilde som kun viser bordet. Alt det rundt er maskert bort:
# Les inn bildet
img = cv.imread("bordet.jpg", cv.IMREAD_UNCHANGED)
# Finn bildets dimensjoner
height, width, _ = img.shape
# Finn linjene i bildet
lines = findLines(img)
# Finn krysning mellom linjene
isects = findIntersections(img, lines)
# Lag et nytt bilde med samme dimensjoner
mask = np.zeros([height, width], dtype = np.uint8)
# Tegn mellom krysningspunktene
cv.fillPoly(mask, np.array([isects], np.int32), 255)
# Bruk det nye bildet som maske
maskedImg = cv.bitwise_and(img, img, mask=mask)
Vi er jo bare interessert i å se på tingene som faktisk ligger på bordet. Ikke stoler og vinduskarm og sånt som er rundt. Så dette blir da utgangspunktet vårt når vi skal finne tingene som står på bordet:
¶Finne objekter i bildet - contour detection
For å finne objekter bruker vi noe som kalles contour detection. Da trenger vi først å gjøre om bildet vårt til svart-hvit og så et binært bilde. Dette skrev jeg om i forrige post også - så vi bruker bare samme greiene om igjen. I tillegg gjør vi noe opprydding for å luke vekk selve kanten på bordet og en del annen støy:
imgGray = cv.cvtColor(maskedImg, cv.COLOR_BGR2GRAY)
edges = cv.Canny(imgGray, 20, 150)
strEl = cv.getStructuringElement(cv.MORPH_ELLIPSE, (30, 30))
closed = cv.morphologyEx(edges, cv.MORPH_CLOSE, strEl)
strEl2 = cv.getStructuringElement(cv.MORPH_ELLIPSE, (5, 5))
opened = cv.morphologyEx(closed, cv.MORPH_OPEN, strEl2)
Da sitter vi med vårt binære kant-bilde (edges i koden) - og det oppryddete bildet vi
skal bruke til å finne objektene (opened i koden). De ser slik ut ved siden av
hverandre:
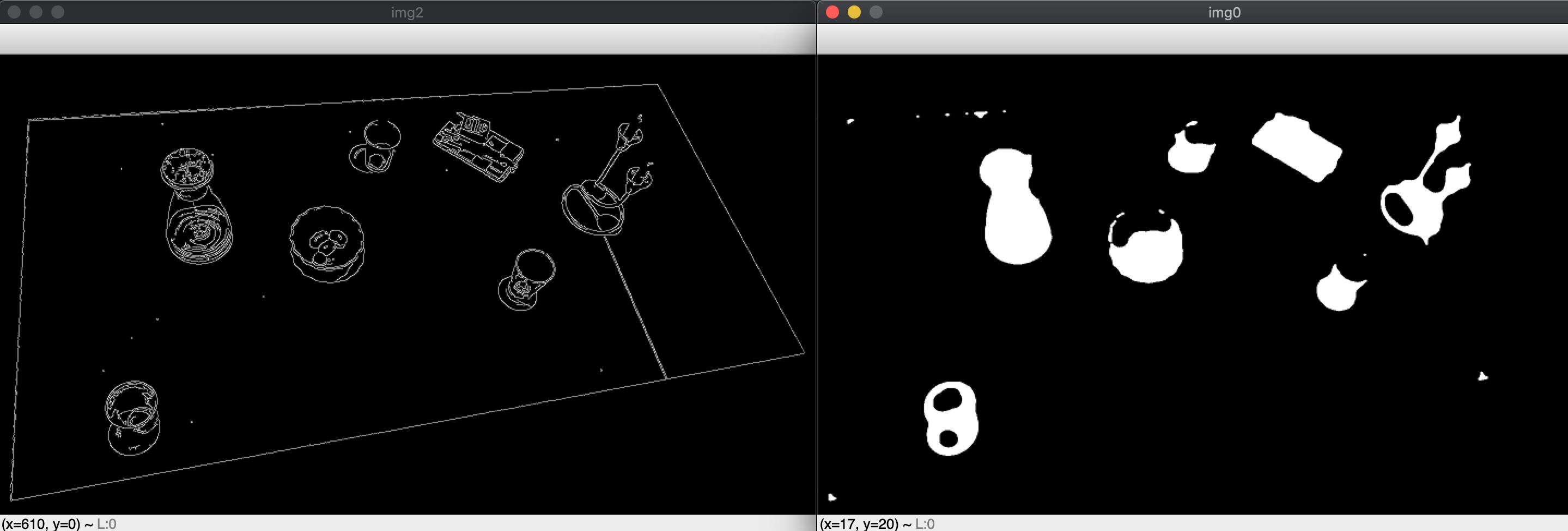
Et objekt eller ‘contour’ er jo egentlig bare en samling sammenhengende piksler. Som vi ser på bildet over har vi fortsatt med en del smårusk - men disse er opplagt mye mindre enn de store objektene vi har lyst å finne. Så kanskje vi bare kan luke dem vekk på størrelse.
For å finne contours i bildet bruker vi funksjonen findContours. Med contourArea kan
vi måle arealet til et objekt i antall piksler. Og da er det enkelt å lage en liste med
bare de objektene som er større enn 1000 piksler:
cnts, hierarchy = cv.findContours(opened, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
largeCnts = [cnt for cnt in cnts if cv.contourArea(cnt) > 1000]
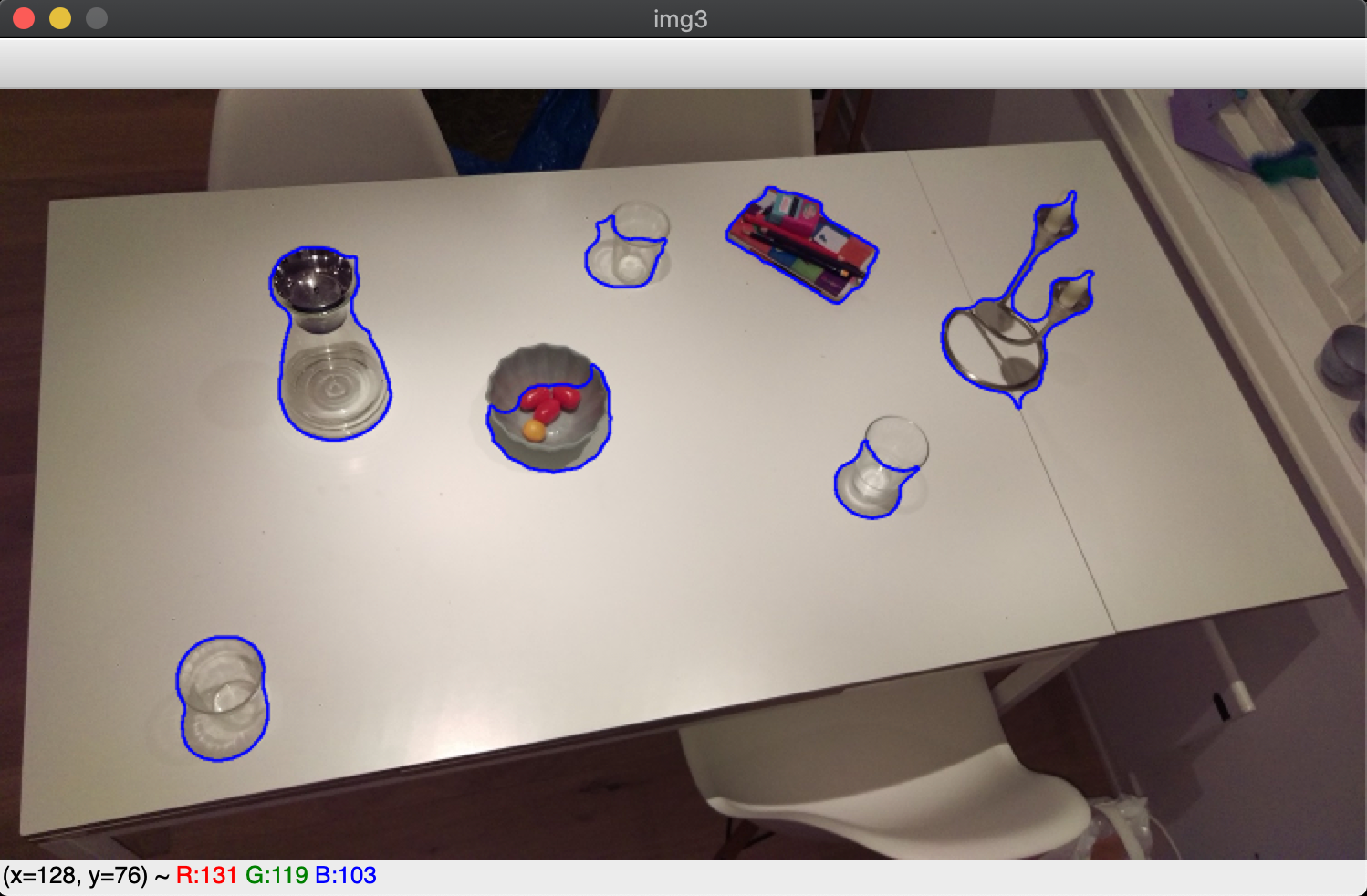
OpenCV har også en funksjon drawContours som kan tegne de på et bilde. Vi bruker denne
for å markere på det originale bildet objektene vi har funnet:
cv.drawContours(img, largeCnts, -1, (255, 0, 0), 2, cv.LINE_AA)
Og da er vi vel egentlig i mål. Ambisjonen min var egentlig bare å lage et program som kunne finne ut om kjøkkenbordet var tomt eller ikke. Og denne her svarer jo fint på det spørsmålet - med fine blå kanter rundt de tingene vi fant:
¶Konklusjon
Gjennom 3 forskjellige poster har jeg nå vist litt av hva man kan gjøre med Python og OpenCV. Bibliotekene er som tidligere nevnt superraske - og kan gjøre ganske avanserte ting. Vi har brukt denne typen teknologi for å lage bildeanalysen til dart-sjappa Oche - og vil gjerne jobbe med mer bildegreier. Så ta kontakt om du vil ha oss med på laget!
