Du får ikke mye til 25 kroner. Men du kan få din egen webserver på en bitte liten microkontroller.
For vanlig web-visningen er det nettleseren som gjør de tunge løftene, og en web-server som skal servere statisk web til litt personlig bruk - kan egentlig da være en datakraft-pingle. Den skal jo bare gi filer.
La oss kombinere to verdener, et høynivå og moderne webprosjekt med ClojureScript - med lavere nivå på en microkontroller. Hvorfor ikke…? Litt C++ er ikke noe å være redd for og jeg vedder 25 kroner på at du kommer til å forstå det aller meste dersom du har vært borti ett eller annet c-like språk.
Dette er et glimrende utgangspunkt til å bruke å web som interface videre hvis du ønsker å lese sensorer, styre motorer, kommunisere med radio eller bluetooth - for å nevne noe du kan gjøre med microkontrollere i arduino-verden. Og hvis du kun vil ha en webserver i lomma, så er det fint også, og det er dette vi skal gjøre her.
¶Aller først: bevis på at jeg ikke lyger om 25 kroner
Jeg bruker her en D1 mini ESP8266.
¶platformio
Først må vi ha platformio installert. Det er enkelt å installere fra den offentlige dokumentasjonen deres. Du kan bruke en hvilken som helst arduino-kompatibel microkontroller som platformio støtter. Platformio støtter det meste.
La oss lage et nytt prosjekt.
$ mkdir pingla
$ cd pingla
$ pio project init --board d1_mini --project-option="platform=espressif8266"
Nå har vi fått et bittelite tomt prosjekt
$ tree
.
├── include
│ └── README
├── lib
│ └── README
├── platformio.ini
├── src
└── test
└── README
4 directories, 4 files
Hvis du har installert VSCode og platformio, kan du åpne dette prosjektet. Vi fortsetter uansett med rein kommandolinje her.
¶ClojureScript
TLDR; vi lager en index.html, kompilerer en main.js fra ClojureScript.
Vi trenger altså to kataloger, en for ClojureScript-prosjektet; cljs/, og en target-katalog som skal opp til dingsen vår; data/www/.
cljs/deps.edn:
{:deps {org.clojure/clojurescript {:mvn/version "1.11.54"}}}
cljs/resources/public/index.html:
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8">
<meta name="viewport" content="width=device-width, initial-scale=1">
<script src="main.js"></script>
</head>
<body>
<script>
pingla.main.start()
</script>
</body>
</html>
cljs/pingla/main.cljs:
(ns pingla.main)
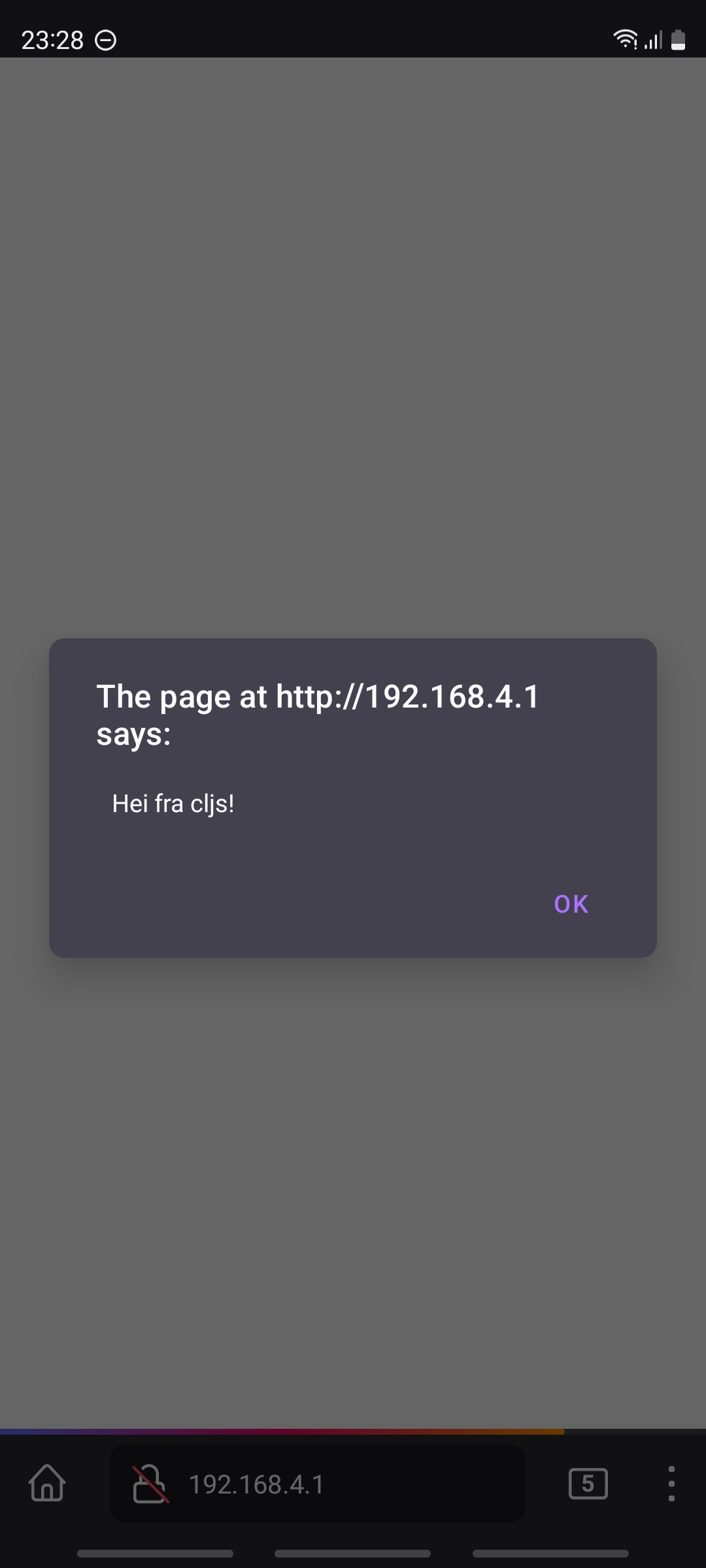
(defn ^:export start []
(js/alert "Hei fra cljs!"))
I ClojureScript lager vi nå kun en popup med js/alert, målet er bare å dette til å snurre. Vi bruker en prosjektstruktur som gjør dette enkelt å innføre Figwheel i etterkant.
Makefile
Merk at Makefile er på root i prosjektet, så for å kompilere ClojureScript så må vi gjøre litt directory -akrobatikk.
build-cljs:
rm -Rf data/www/*
cd cljs; clj -M -m cljs.main --optimizations advanced -c pingla.main; cd .. ;
mv cljs/out/main.js data/www/
cp cljs/resources/public/index.html data/www/
clean:
rm -Rf cljs/out
rm data/www
¶C++
TLDR; Vi lager et eget wifi-nett og starter en webserver på 192.168.4.1 som server de to filene i data/www/
Prosjektavhengighet i platformio
Noen har tatt bryet med å skrive en web-server vi kan bruke, så legg til dette i platformio.ini
lib_deps =
ottowinter/ESPAsyncWebServer-esphome@^3.0.0
ESP8266WiFi
boilerplate for setup() og loop()
Dette er standard hello world for Arduino.
src/main.cpp
#include <Arduino.h>
void setup() {
Serial.begin(9600);
Serial.println("Setup");
}
void loop() {
Serial.println("Loop");
}
Vi må kompilere (build), laste opp executable (upload) og koble oss til (monitor) for å lese output, så trenger vi disse kommandoene i Makefile
build:
pio run -e d1_mini
upload:
pio run -e d1_mini --target upload
monitor:
pio device monitor
bum: build upload monitor
Jeg liker å ha et kort alias som kjører alle 3, og står du igjen med at Loop spammer ned skjermen din
$ make bum
[...]
Loop
Loop
Loop
Loop
Loop
Loop
Loop
Loop
Loop
Loop
Loop
Loop
Loop
Loop
Loop
Loop
Loop
Loop
http server
Nå skal vi lime alt sammen og lage wifi, websever og levere filene våre fra frontend-prosjektet.
Det er dårlig praksis å fylle opp main.cpp med masse greier, så vi kaller bare setup() i WEB fra main.cpp og gjør alt arbeidet i web.cpp.
main.cpp:
#include <Arduino.h>
#include "web.h"
void setup() {
Serial.begin(9600);
Serial.println("Setup");
WEB::setup();
}
void loop() {}
src/web.h:
#ifndef web_h
#define web_h
namespace WEB {
void setup();
}
#endif
src/web.cpp:
#include <Arduino.h>
#ifdef ESP32
#include <WiFi.h>
#include <AsyncTCP.h>
#elif defined(ESP8266)
#include <ESP8266WiFi.h>
#include <ESPAsyncTCP.h>
#endif
#include "ESPAsyncWebServer.h"
#include "LittleFS.h"
namespace WEB {
AsyncWebServer server(80);
const char* ssid = "pingla";
const char* password = "pingla";
IPAddress local_IP(192,168,4,1);
IPAddress gateway(192,168,4,254);
IPAddress subnet(255,255,255,0);
void notFound(AsyncWebServerRequest *request) {
request->send(404, "text/plain", "Not found");
}
void setup() {
Serial.print("Setting soft-AP configuration ... ");
Serial.println(WiFi.softAPConfig(local_IP, gateway, subnet) ? "Ready" : "Failed!");
Serial.print("Setting soft-AP ... ");
Serial.println(WiFi.softAP(ssid) ? "Ready" : "Failed!");
Serial.print("Soft-AP IP address = ");
Serial.println(WiFi.softAPIP());
LittleFS.begin();
server.on("/", HTTP_GET, [](AsyncWebServerRequest *request){
File file = LittleFS.open("/www/index.html", "r");
request->send(200, "text/html;charset=utf-8", file.readString());
file.close();
});
server.on("/main.js", HTTP_GET, [](AsyncWebServerRequest *request){
File file = LittleFS.open("/www/main.js", "r");
request->send(200, "text/javascript; charset=utf-8", file.readString());
file.close();
});
server.onNotFound(notFound);
server.begin();
Serial.print("Pingla er klar");
}
}
LittleFS
LittleFS er filsystemet på dingsen vår, og må uploades separat fra executable-en. Det fine med dette er at vi ikke trenger å røre programmet hvis det kun er endringer på web-filene vice versa.
upload-files:
pio run -e d1_mini -t buildfs
pio run -e d1_mini -t uploadfs
$ make upload-files
[...]
Writing at 0x00028000... (73 %)
Writing at 0x0002c000... (80 %)
Writing at 0x00030000... (86 %)
Writing at 0x00034000... (93 %)
Writing at 0x00038000... (100 %)
Wrote 328208 bytes (238682 compressed) at 0x00000000 in 3.1 seconds (effective 837.4 kbit/s)...
Hash of data verified.
Leaving...
Hard resetting via RTS pin...
========================================================= [SUCCESS] Took 5.49 seconds =========================================================
$ make bum
[...]
Setting soft-AP ... Ready
Soft-AP IP address = 192.168.4.1
Pingla er klar
¶Arbeidsflyten videre
Nå er vi ferdige med fundamentet, og det fungerer som du ser på screenshotten over.
I tillegg er det kjekt med en liten ekstra kort kommando som bygger cljs og uploader til mikrokontrolleren i en og samme operasjon. $make cu
# [...]
upload-files:
pio run --target buildfs --environment d1_mini
pio run --target uploadfs --environment d1_mini
bum: build upload monitor
cu: build-cljs upload-files
Nå har vi $make bum som bygger og laster opp endringer på back-end, og $make cu som bygger og laster opp endringer i front-end. Korte kommandoer gjør hverdagen bedre.
Prosjektet finner du i helhet på github.
